WENN SIE ES GENAUER WISSEN WOLLEN:

Die Zwei- bzw. Dreipunktregler des letzten Kapitels arbeiteten nach einem ganz einfachen Funktionsschema, indem sie über das Stellglied nur zwei bzw. drei Zustände ansteuerten. Damit verbunden waren i.d.R. mehr oder weniger stark ausgeprägte Regelschwingungen, eine hohe Beanspruchung von Stellgliedern mit mechanischen Komponenten durch hohe Schaltfrequenzen und bleibende Regeldifferenzen. Möchte man diese Nachteile korrigieren, so muss man zu stetigen Reglern übergehen. Diese können beliebige Zwischenwerte innerhalb bauartbedingter Grenzen ansteuern, was jedoch nur Sinn macht, wenn auch die verwendeten Stellglieder diese Signale verarbeiten können, also selbst auch stetig arbeiten. Wir wollen nachfolgend schrittweise den Aufbau des stetigen Standardreglers an sich, des sog. PID-Reglers, kennenlernen.
P-Anteil
Ein elementarer Teil des PID-Reglers ist der sog. P-Anteil. Er kann als solcher auch isoliert bereits zum Regeln angewendet werden. Man spricht dann vom P-Regler. Allerdings wird dieser in der Praxis aufgrund seiner Nachteile eher selten benutzt. Das „P“ steht für „proportional“ und kennzeichnet ein Übertragungsverhalten des im Kapitel „Lineare Basisübertragungsglieder“ als Typ P geführten Systems:
Die Regeldifferenz e wird lediglich mit einem zu konfigurierenden Faktor kR – wir sprechen vom Verstärkungsfaktor des Reglers – multipliziert und über das Stellglied als Stellgröße y auf die Strecke gegeben. Formel 1 bezieht sich auf den eigentlichen Regler inklusive Stellglied.
Die Regelung einer PT1Tt-Strecke, also einer PT1-Strecke mit zusätzlicher Totzeit, zeigt als Simulationsergebnis nachfolgendes Bild. Das Ergebnis zeigt eine typische Eigenschaft bei der Regelung mit P-Reglern: Es sind auch im eingeschwungenen Zustand von Sollwert bzw. Störgröße bleibende Regeldifferenzen zu verzeichnen, die bei Vergrößerung des Verstärkungsfaktor kR kleiner werden. Letzteres wiederum führt jedoch zu verstärkten Schwingungen, wie sie im Bild ebenfalls erkennbar sind. Ein reiner P-Regler ist deshalb in der Praxis meist nicht gut anwendbar.
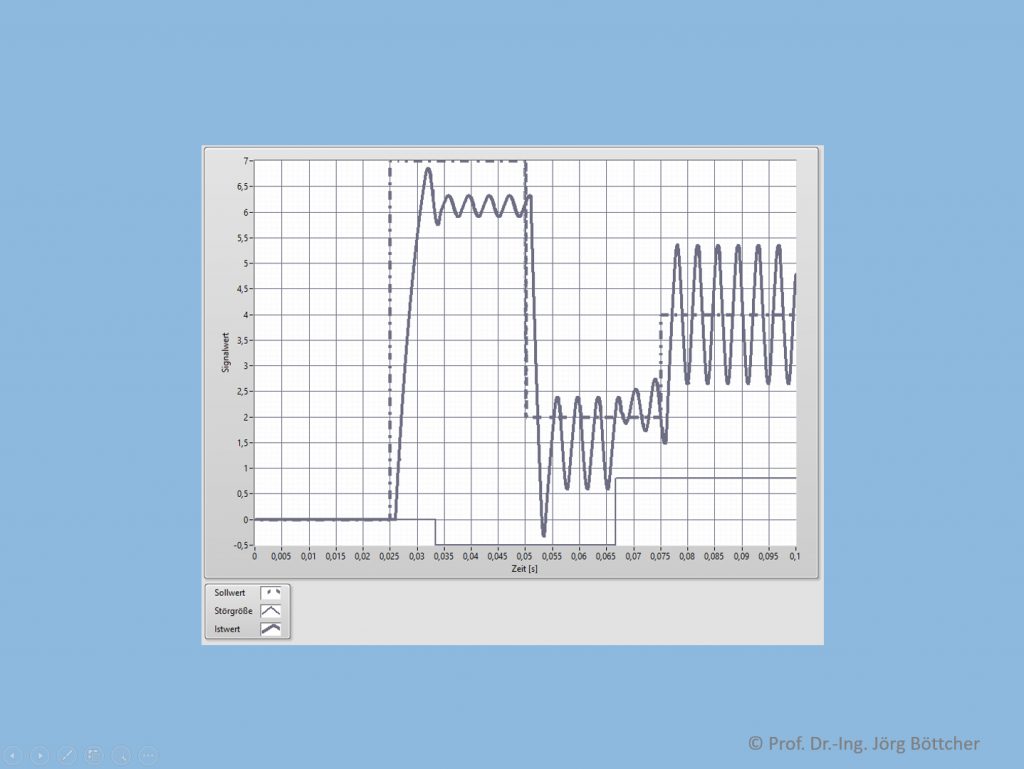
Regelkreis mit P-Regler (kR = 2, Stellbereich -2 … +2) und PT1Tt-Strecke (kP = 5, T1 = 5 ms, T = 1 ms)
I-Anteil
Ein reiner Verstärker als Regler, wie dies beim P-Anteil der Fall war, benötigt immer eine Regeldifferenz am Eingang, um ein Ausgangssignal zu produzieren. Dies führte zu den bleibenden Regeldifferenzen. Es bietet sich deshalb an, nach einem stetigen Reglertyp zu suchen, der über eine eingebaute Speicherfunktion verfügt, die es ihm gestattet, weiterhin Ausgangssignale zu produzieren, auch wenn die Regeldifferenz am Eingang zu 0 geworden ist. Einen solchen Speicher haben wir mit dem Basisübertragungstyp I, einem Integrator:
Wir haben hier die Schreibweise mit unbestimmtem Integral benutzt. In der praktischen Umsetzung (siehe auch nächstes Kapitel) muss man zu einem bestimmten Zeitpunkt mit der Integration und einem Startwert von typ. 0 beginnen. In der Praxis ist dies der Einschaltzeitpunkt, bei Simulationen der Simulationsbeginn. Beim Führungs- und Störverhalten würde man mit einem reinen I-Regler im Falle proportionaler Strecken die bleibenden Regeldifferenzen auf 0 bekommen, jedoch zeigt sich, dass das Einschwingen selbst sehr träge ist und für die meisten Fälle in der Praxis nicht akzeptabel. Die Anwendung eines I-Reglers auf integrative Strecken führt i.d.R. zu einem instabilen Verhalten in Form eines großamplitudigen Aufschwingens des Regelkreises.
PI-Regler
Eine proportionale und integrative Strecken sehr gut regelnde Struktur ist eine Kombination der bisherigen beiden stetigen Anteile P und I:
Ein PI-Regler ist demnach eine Parallelanordnung eines P-Anteils und eines I-Anteils. Es wird lediglich ein beiden Anteilen gemeinsamer Verstärkungsfaktor kR vor die Klammer in der Formel gestellt. TN nennt sich „Nachstellzeit“.
PID-Regler
Der PI-Regler wird in der Praxis meist noch etwas „getunt“ durch Hinzunahme eines weiteren Anteils, des sog. D-Anteils. „D“ steht für Differenzieren und stellt quasi das Gegenteil des I-Anteils dar, einen konfigurierbaren Differenzierer. Ein solcher Differenzierer allein macht als Regler keinen Sinn. Er produziert ja nur einen Ausgangswert, wenn sich am Eingang, also der Regeldifferenz, etwas ändert. Aber er kann vorteilhaft dazu verwendet werden, einen PI-Regler im Einschwingen noch zu verbessern, i.d.R. indem Überschwinger reduziert werden, oft auch in Verbindung mit etwas kürzeren Einschwingzeiten noch. Ein PID-Regler arbeitet nach folgender Vorschrift:

Der additiv in der Klammer hinzugefügte D-Anteil verfügt über eine parametrierbare Zeitkonstante TV („Vorhaltzeit“). Dieselbe Strecke wie in obigem Bild, nunmehr jedoch mit einen sinnvoll parametrierten PID-Regler geregelt, zeigt nachfolgendes Bild.
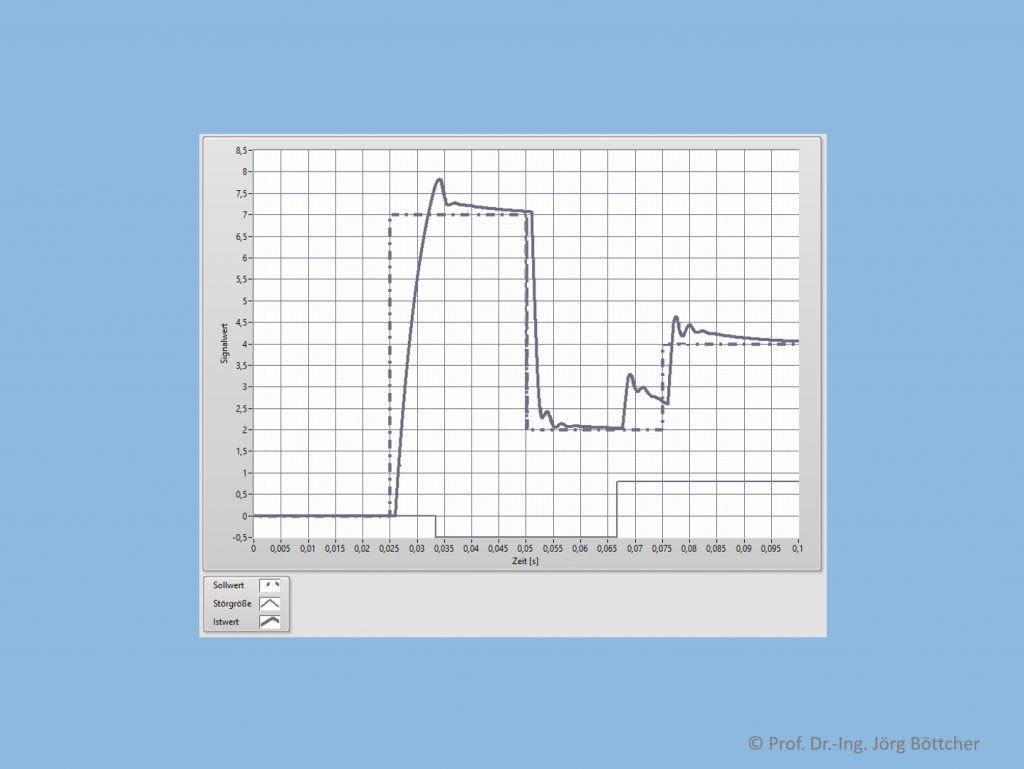
Regelkreis mit PID-Regler (kR = 1, TN = 10 ms, TV = 0,5 ms, Stellbereich -2 … +2) und PT1Tt-Strecke (kP = 5, T1 = 5 ms, T = 1 ms)
WENN SIE ES GENAUER WISSEN WOLLEN: